Hall-efektin anturi
Hall-anturit havaitsevat kestomagneetin tai sähkömagneetin magneettikentän voimakkuuden ja suunnan. Hall-efektianturin lähtö on sen magneettikentän funktio ja voi havaita sekä positiiviset että negatiiviset magneettikentät.
Hall-efektianturin toimintaperiaate
Ulkoinen magneettikenttä aktivoi hall-efektianturit. Magneettikentät esitetään vuotiheydellä (B) ja sen magneettisilla napoilla, kuten joko pohjoisnavalla tai etelänavalla. Hall-efektianturin ympärillä oleva magnetismi määrittää sen lähtösignaalin. Kun ympäristön magneettivuon tiheys ylittää ennalta määrätyn kynnysarvon, anturi tuottaa Hall-jännitteen VH.
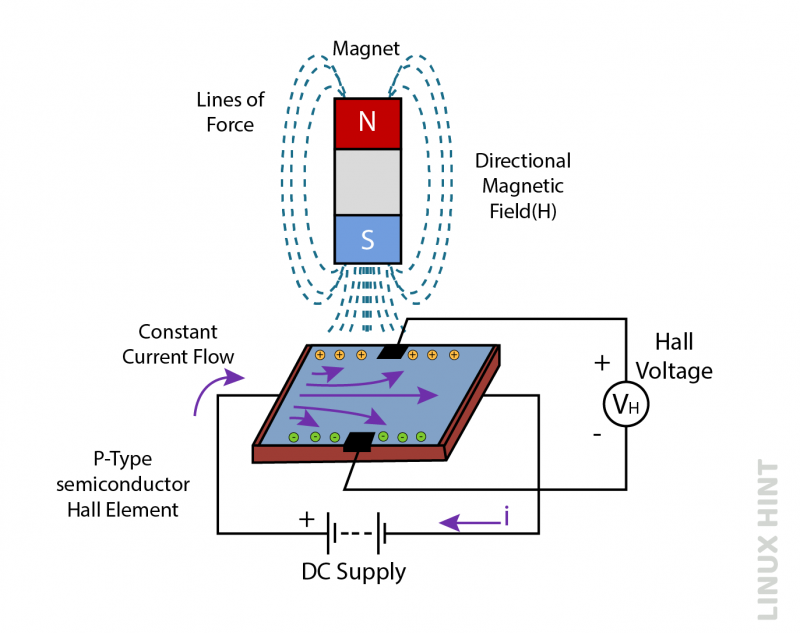
Puolijohdeanturit ovat p-tyypin puolijohteita, kuten galliumarsenidi (GaAs), indiumarsenidi (InAs) ja indiumantimonidi (InSb), jotka johtavat tasavirtaa. Puolijohdemateriaali kokee voiman magneettikentän läsnäollessa, jolloin sekä elektronit että aukot siirtyvät puolijohdekerroksen sivuille. Kun elektronit ja reiät liikkuvat jommallekummalle puolelle, puolijohteiden eri puolille kehittyy potentiaaliero. Litteissä suorakaiteen muotoisissa materiaaleissa puolijohdemateriaaliin nähden kohtisuoralla ulkoisella magneettikentällä on suurempi vaikutus elektronien liikkuvuuteen.
Hall-ilmiö näyttää magneettinapatyypin ja sen kentänvoimakkuuden. Esimerkiksi toisessa magneetin navassa on jännite, mutta ei toisessa. Hall-anturit ovat yleensä 'pois päältä' ja toimivat kuin avoin piiri, kun magneettikenttää ei ole. Ne ovat kiinni vain voimakkaasti polarisoidun magneettikentän alla (suljettu piiri).
Hall-efektin magneettisensorin ominaisuudet
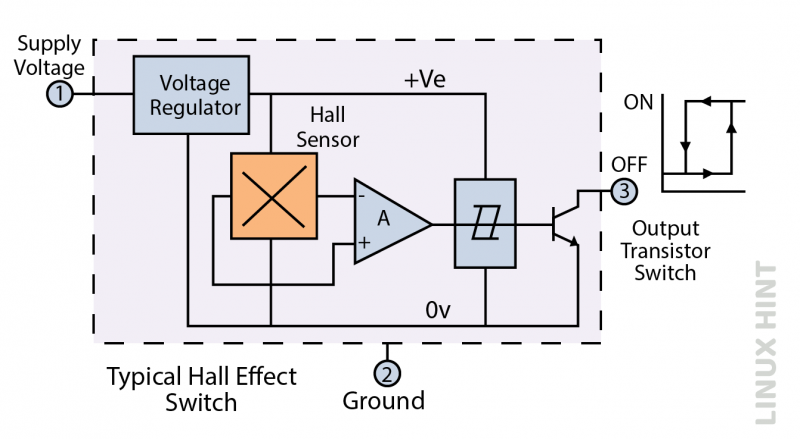
Hallin jännite (V H Hall-efektianturin ) on sen magneettikentän voimakkuuden (H) funktio. Useimmat kaupalliset Hall-efektilaitteet sisältävät tasavirtavahvistimet, kytkentälogiikkapiirit ja jännitteensäätimet anturin herkkyyden ja lähtöjännitteiden parantamiseksi. Tämän ansiosta hall-efektitunnistin pystyy käsittelemään enemmän tehoa ja magneettikenttiä.
Hall-efektin magneettisensorin piirikaavio
Puoliaktiivisissa antureissa on lineaariset tai digitaaliset lähdöt. Lineaarisen anturin lähtöjännite liittyy suoraan Hall-anturin läpi virtaavaan magneettikenttään, ja sen tuottaa operaatiovahvistin.
Hall-efektin jänniteyhtälö
Lähtöjänniteyhtälö saadaan seuraavasti:

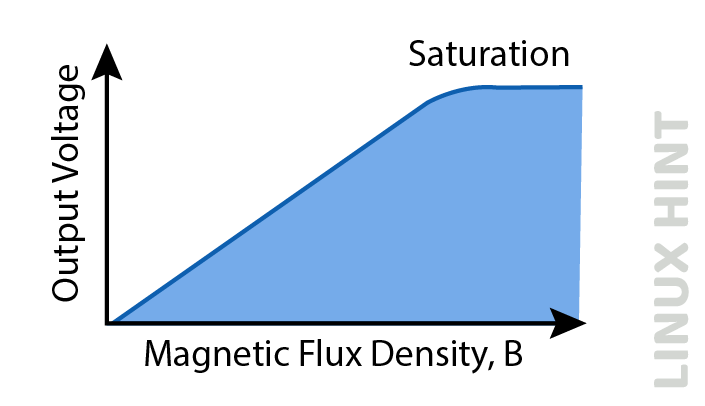
Täällä, V H tarkoittaa Hall-jännitettä, R H tarkoittaa Hall-ilmiökerrointa, I tarkoittaa virtaa, t tarkoittaa paksuutta ja B tarkoittaa magneettivuon tiheyttä. Lineaariset tai analogiset anturit tuottavat vakiojännitteen, joka kasvaa vahvemmilla magneettikentillä ja laskee heikompien kenttien myötä. Hall-anturissa magneettikentän voimakkuuden kasvaessa vahvistimen lähtösignaali kasvaa, kunnes virtalähde kyllästyy. Magneettikentän lisääminen saa lähdön kyllästymään, mutta sillä ei ole vaikutusta:
Kun hall-anturin lähtö ylittää ennalta määrätyn sen läpi virtaavan magneettivuon tason, koskettimet siirtyvät nopeasti 'suljetusta'-tilasta 'avoin'-tilaan ilman pomppimista. Tämä sisäänrakennettu hystereesi estää lähtösignaalin värähtelyn anturin siirtyessä magneettikenttään. Tämä tarkoittaa, että digitaalilähtöanturilla on vain 'on' ja 'off'-tilat.
Hall-efektin anturityypit
Hall-efektiantureita voi olla kahta tyyppiä: bipolaariset hall-efektianturit ja unipolaariset hall-efektianturit. Unipolaariset anturit voivat toimia ja purkaa, kun ne tulevat ja poistuvat magneettikentästä, jolla on sama etelämagneettinen napa, kun taas bipolaariset anturit vaativat sekä positiivisia että negatiivisia magneettikenttiä toimiakseen ja purkautuakseen. 10-20 mA:n lähtötaajuusmuuttajiensa ansiosta useimmat hall-efektilaitteet eivät pysty suoraan kytkemään suuria virtakuormia. Suuria virtakuormia varten NPN-transistori lisätään lähtöön avoimella kollektorijärjestelyllä.
Hall-efektianturien sovellukset
Hall-efektianturit kytketään PÄÄLLE magneettikenttien läsnäollessa ja niitä ohjataan yhdellä pysyvällä magneetilla liikkuvassa akselissa tai laitteessa. Herkkyyden maksimoimiseksi magneettivuon linjojen on oltava kohtisuorassa anturikenttään nähden ja oikealla polarisaatiolla kaikissa kokoonpanoissa.
1: Head on Detection
Se edellyttää, että magneettikenttä on kohtisuorassa hall-ilmiöön nähden, kuten alla on esitetty:
Tämä tekniikka tuottaa lähtösignaalin, V H , joka mittaa magneettivuon tiheyttä lineaarisissa laitteissa etäisyyden funktiona Hall-efektianturista. Lähtöjännite kasvaa magneettikentän voimakkuuden ja sen läheisyyden myötä.
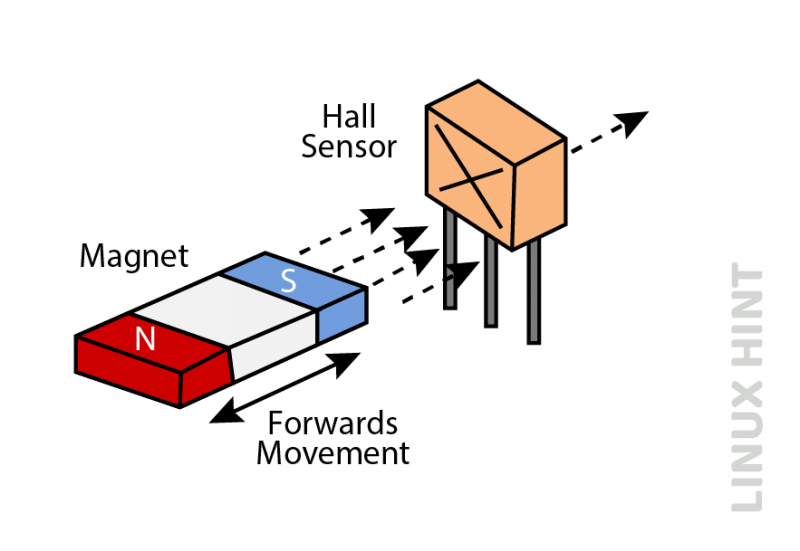
2: Sivusuuntainen tunnistus
Se vaatii epäsuoran magneettivuon, kun magneetti liikkuu sivuttain hall-efektielementin poikki.
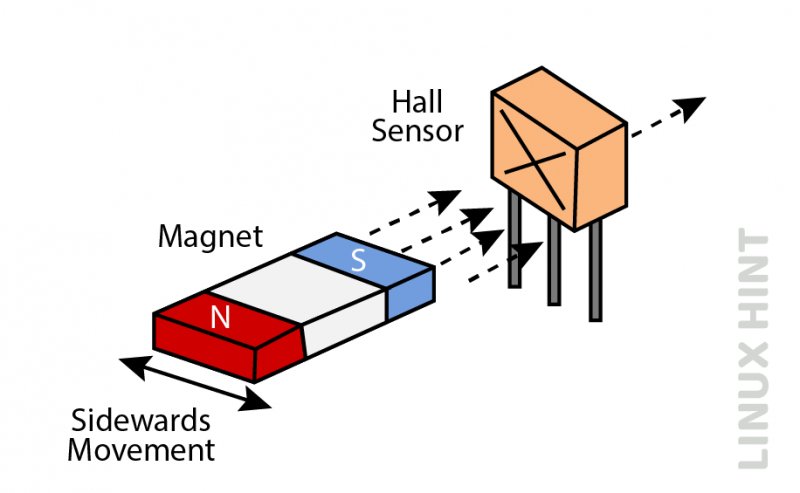
Sivuttais- tai liikkuvat anturit voivat mitata pyörivien magneettien tai moottoreiden nopeutta havaitsemalla Hall-elementin pinnalla liukuvan magneettikentän tietyllä etäisyydellä ilmavälistä.
Positiivinen tai negatiivinen lineaarinen lähtöjännite voidaan tuottaa riippuen anturin nollakentän keskilinjan läpi kulkevan magneettikentän sijainnista. Se määrittää pysty- ja vaakasuuntaiset liikkeet.
3: Asennon ohjaus
Paikkatunnistin pysyy 'pois'-tilassa, kun magneettikenttää ei ole. Heti kun magneetin etelänapa liikkuu kohtisuoraan hall-efektianturin läheisyyteen nähden, laite kytkeytyy 'päälle' ja LED palaa. Kun virta kytketään, hall-efektitunnistin on ON-tilassa.
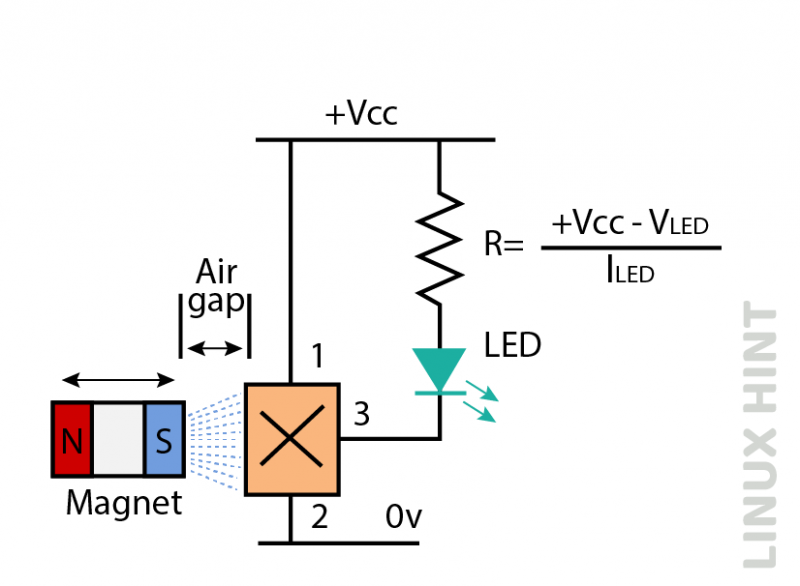
LEDin sammuttamiseksi magneettikentän tulee pudota alle sen pienimmän havaittavan laukaisupisteen tai se voidaan myös kohdata vastakkainen pohjoisnapa negatiivisella gauss-arvolla.
Johtopäätös
Hall-efektiantureita käytetään magneettikenttien suunnan ja voimakkuuden havaitsemiseen. Niitä käytetään monenlaisissa sovelluksissa, kuten autoissa, läheisyystunnistuksessa, pään päällä, sivuttain ja eri magneettikenttien asennontunnistuksessa.