Ennen kuin alamme liittää ESP32:n PIR-anturin kanssa, meidän on tiedettävä, miten keskeytykset toimivat ja kuinka niitä luetaan ja käsitellään ESP32:ssa. Keskustellaan PIR:n toiminnasta ESP32:n kanssa yksityiskohtaisesti.
Tässä on tämän artikkelin sisältö:
1.1: Keskeyttää nastat ESP32:ssa
2: Keskeytyksen kutsuminen ESP32:ssa – MicroPython
3: Liitäntä PIR-anturiin ESP32:n kanssa – MicroPython
3.1: PIR-liiketunnistin (HC-SR501)
1: Mitä ovat keskeytykset
Suurin osa ESP32-ohjelmoinnin tapahtumista suoritetaan peräkkäin, mikä tarkoittaa koodin suorittamista rivi riviltä. Käsitelläksesi ja hallitaksesi tapahtumia, joita ei tarvitse suorittaa koodin peräkkäisen suorituksen aikana Keskeyttää käytetään.
Esimerkiksi, jos haluamme suorittaa tietyn tehtävän, kun jokin erikoistapahtuma tapahtuu, tai jos mikro-ohjaimen digitaalisille pinnoille annetaan laukaisusignaali, käytämme keskeytystä.
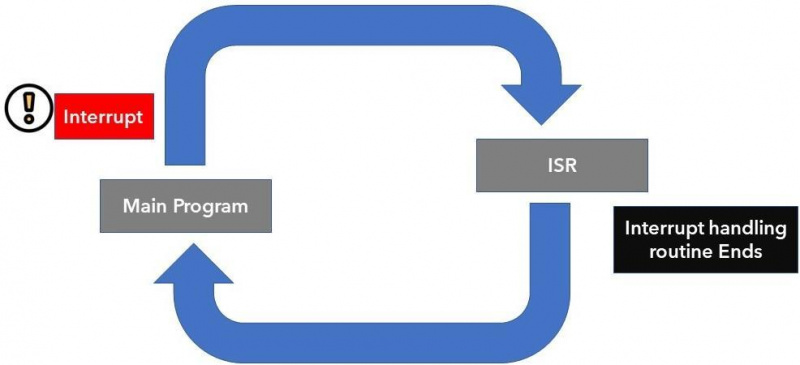
Keskeytyksen vuoksi meidän ei tarvitse jatkuvasti tarkistaa ESP32-tulonastan digitaalista tilaa. Kun keskeytys tapahtuu, prosessori pysäyttää pääohjelman ja kutsutaan uusi toiminto, joka tunnetaan nimellä ISR ( Keskeytä palvelurutiini ). Tämä ISR funktio käsittelee sen jälkeen aiheutetun keskeytyksen palaa takaisin pääohjelmaan ja aloittaa sen suorittamisen. Yksi ISR-esimerkeistä on PIR-liiketunnistin, joka luo keskeytyksen, kun liike havaitaan.
1.1: Keskeyttää nastat ESP32:ssa
Ulkoisen tai laitteiston keskeytyksen voi aiheuttaa mikä tahansa laitteistomoduuli, kuten kosketusanturi tai painopainike. Kosketuskeskeytykset tapahtuvat, kun ESP32-nastojen kosketus havaitaan, tai GPIO-keskeytystä voidaan käyttää myös, kun näppäintä tai painopainiketta painetaan.
Tässä artikkelissa käynnistämme keskeytyksen, kun liike havaitaan käyttämällä PIR-anturia ESP32:n kanssa.
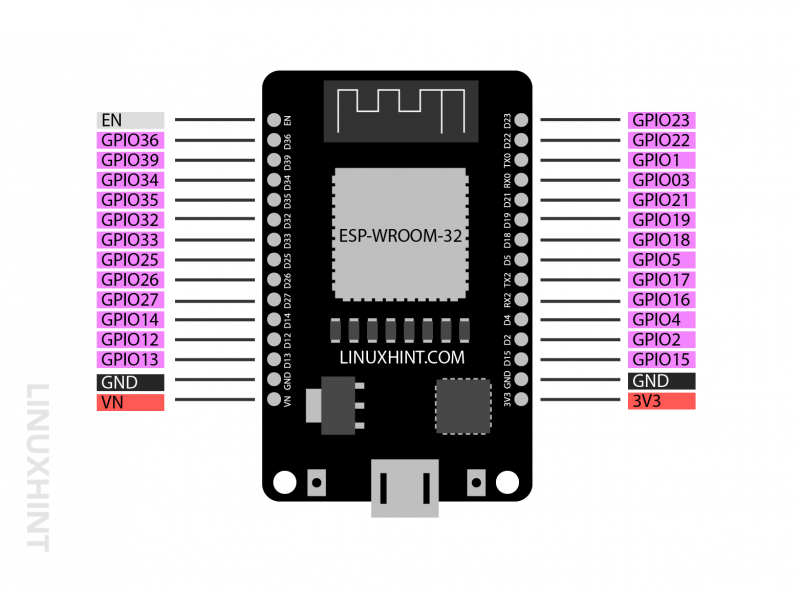
Melkein kaikki GPIO-nastat paitsi 6 integroitua SPI-nastaa, jotka yleensä tulevat sisään 36 ESP32-kortin pin-versiota ei voi käyttää puhelun keskeytystarkoituksiin. Joten ulkoisen keskeytyksen vastaanottamiseksi ovat seuraavat nastat, joita voidaan käyttää ESP32:ssa:
2: Keskeytyksen soittaminen ESP32:ssa MicroPythonilla
ESP32-kortin ohjelmointi PIR-anturilla MicroPython-koodilla. Meidän on määriteltävä keskeytysfunktio. Seuraavassa on muutamia yksinkertaisia vaiheita, jotka auttavat määrittämään keskeytyksen ESP32-kortille.
Vaihe 1: Alusta keskeytyksen käsittelytoiminto: Keskeytysten käsittelytoiminto tulee määritellä helposti, jotta se voidaan suorittaa nopeasti ja palata takaisin pääohjelmaan mahdollisimman nopeasti. Tämä voidaan tehdä määrittämällä globaali muuttuja, jotta sitä voidaan käyttää missä tahansa koodin sisällä, jos sitä kutsutaan.
Tässä PIR-anturin tapauksessa käytämme GPIO-nastaa a maailmanlaajuisesti muuttuja. Keskeytystoiminto ottaa nastan argumenttina ja kuvaa GPIO-nastaa, joka aiheuttaa keskeytystoiminnon esiintymisen.
def handle_interrupt ( pin ) :Vaihe 2: Aseta GPIO-pinni keskeytystä varten: Saadaksemme GPIO-nastan arvon meidän on luotava objekti, joka ottaa siitä syötteen käyttämällä Pin.IN toisena argumenttina pin-luokkamme sisällä. Voimme nimetä tämän uudelleen millä tahansa muulla.
pin = Pin ( 13 , Pin. SISÄÄN )Vaihe 3: Liitä keskeytys PIR-anturin GPIO-nastan irq()-menetelmällä:
Alla olevan komennon avulla voimme asettaa keskeytyksen aiemmin määrittämäämme nastalle.
silta. irq ( laukaista = Pin. IRQ_RISING , käsittelijä = käsittele_keskeytys )The irq() menetelmää käytetään liittämään keskeytys tappiin. irq() hyväksyy kaksi eri argumenttia:
- Laukaista
- Käsittelijä
laukaista: Tämä argumentti selittää laukaisutavan. Seuraavassa on kolme tilaa:
- Pin.IRQ_FALLING: Kun nasta siirtyy arvosta HIGH tilaan LOW, keskeytys alkaa.
- Pin.IRQ_RISING: Kun nasta siirtyy LOW:sta HIGH:iin, keskeytys alkaa.
- Pin.IRQ_FALLING|Pin.IRQ_RISING: Laukaise keskeytys aina, kun nasta muuttaa tilaansa. Joko nasta menee tilaan HIGH tai LOW.
käsittelijä: Tätä toimintoa kutsutaan, kun keskeytys laukeaa.
3: Liitäntä PIR-anturiin ESP32:n kanssa
Kuten nyt olemme käsitelleet keskeytyksen käsitteet ESP32:lla MicroPythonin avulla, liitämme PIR-anturin ESP32:een. Täällä aiomme käyttää Pin.IRQ_RISING -tilassa MicroPython-koodissa PIR-anturille, koska haluamme laukaista LEDin aina, kun PIR-anturi havaitsee liikettä. Tämä LED palaa tietyn ajan ja sammuu sitten.
Tarvitaan seuraavat komponentit:
- ESP32 kehityskortti
- PIR-liiketunnistin (HC-SR501)
- 220 ohmin vastus
- Hyppyjohtimet
- Leipälauta
- LED
Kaaviomainen PIR-anturi ESP32:lla:
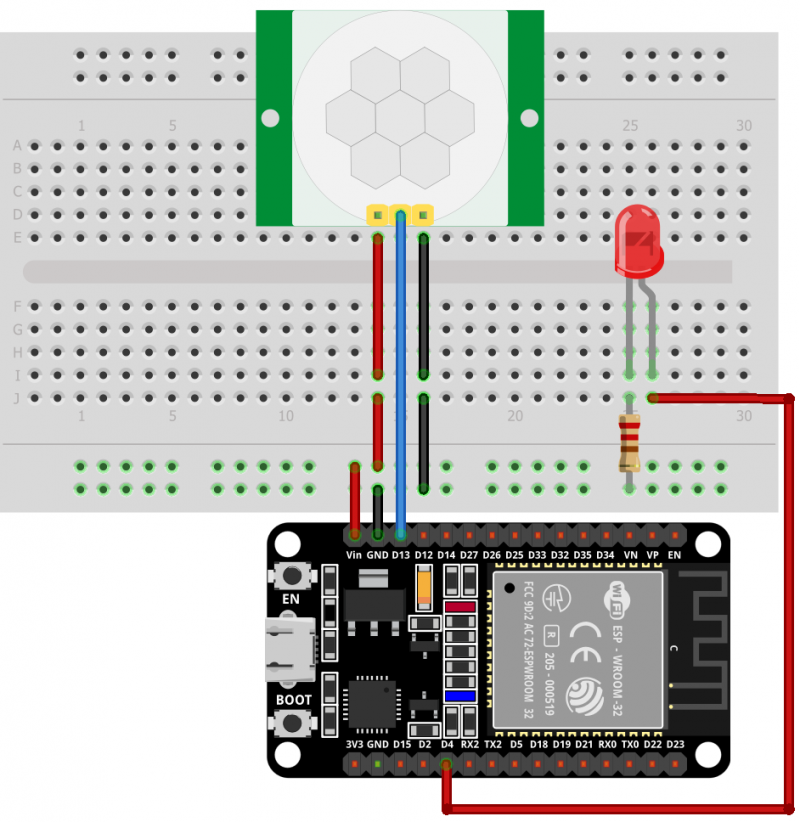
PIR-anturilla varustetun ESP32:n pin-konfiguraatio on:
3.1: PIR-liiketunnistin (HC-SR501)
PIR on lyhenne sanoista Passiiviset infrapuna-anturit . Kaksi yhdessä käytettyä pyrosähköistä anturia, jotka havaitsevat lämpömäärän ympäristöstään. Molemmat pyrosähköiset anturit sijaitsevat peräkkäin ja kun esine tulee niiden kantaman sisäpuolelle, lämpöenergian muutos tai signaaliero näiden molempien antureiden välillä aiheuttaa PIR-anturin lähdön olevan MATALA. Kun PIR-ulostulonasta menee LOW-tilaan, voimme asettaa tietyn käskyn suoritettavaksi (LED-valo vilkkuu).
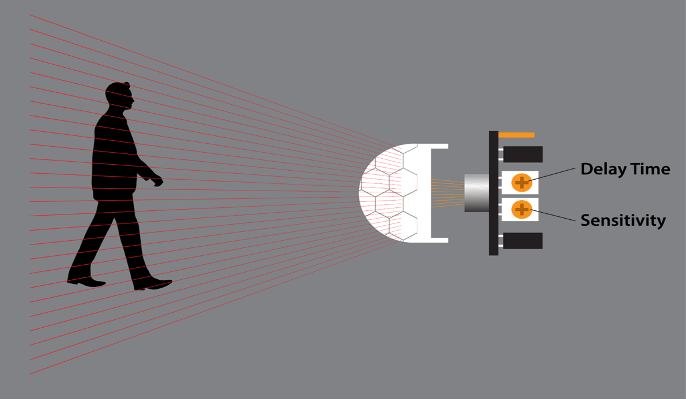
Seuraavat ovat PIR-anturin ominaisuudet:
- Herkkyys voidaan asettaa projektin sijainnin mukaan (kuten hiiren tai lehtien liikkeen havaitseminen)
- PIR-anturi voidaan asettaa, kuinka kauan se havaitsee kohteen
- Käytetään laajasti kodin turvahälyttimissä ja muissa lämpöpohjaisissa liikkeentunnistussovelluksissa.
3.2: Pinout HC-SR501
PIR HC-SR501:ssä on kolme nastaa. Kaksi niistä on tehonastoja Vcc:lle ja GND:lle ja yksi on lähtönasta liipaisusignaalille.
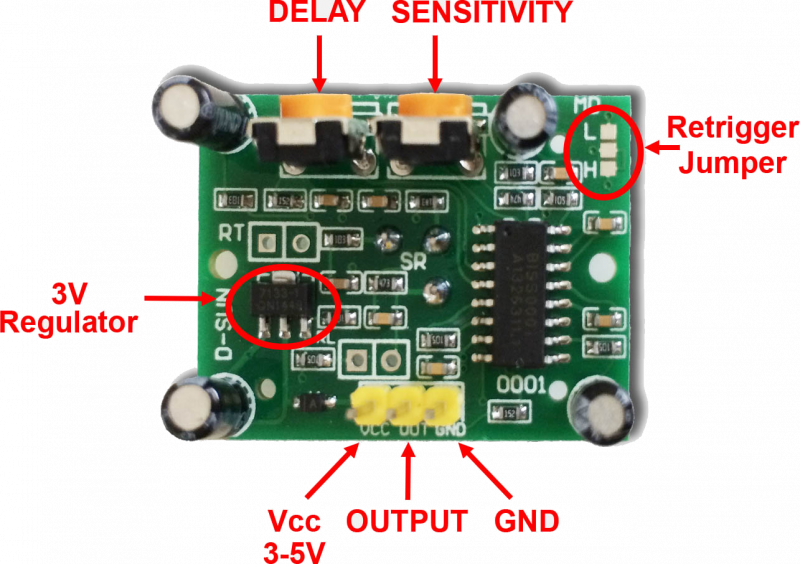
Seuraavassa on kuvaus PIR-anturin nastat:
| Pin | Nimi | Kuvaus |
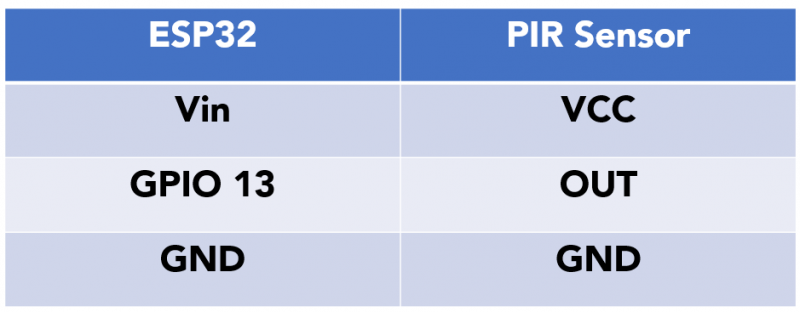
| 1 | Vcc | Anturin tulonasta Yhdistä ESP32 Vin Pin-liittimeen |
| kaksi | OUT | Anturin lähtö |
| 3 | GND | Anturi GND |
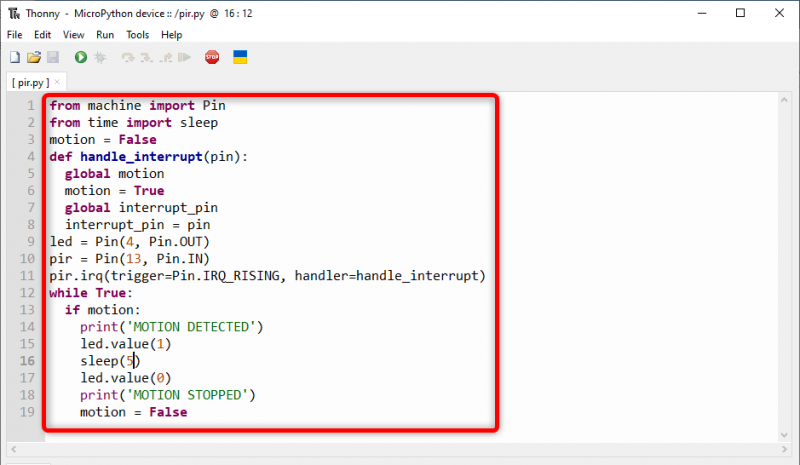
Nyt ohjelmoidaksesi ESP32:n kirjoita annettu koodi Thonny IDE -editoriin tai mihin tahansa muuhun MicroPython IDE:hen ja lataa se ESP32:een.
koneen tuonnista Pinalkaen aika tuoda unta
liikettä = Väärä
def handle_interrupt ( pin ) :
globaali liike
liikettä = Totta
globaali keskeytyspinta
keskeytä_pin = pin
johti = Pin ( 4 , Pin. OUT )
silta = Pin ( 13 , Pin. SISÄÄN )
silta. irq ( laukaista = Pin. IRQ_RISING , käsittelijä = käsittele_keskeytys )
sillä aikaa Totta :
jos liikettä :
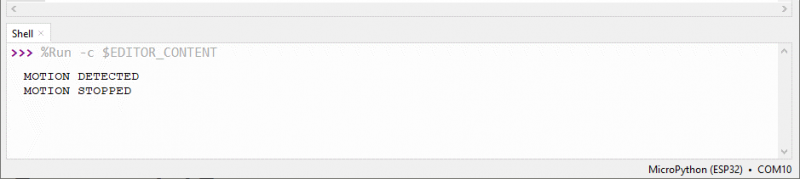
Tulosta ( 'MOTION DETECTED' )
johti. arvo ( 1 )
nukkua ( 5 )
johti. arvo ( 0 )
Tulosta ( 'LIIKKE PYSÄYTETTY' )
liikettä = Väärä
Ensin toimme maahan pin luokka konemoduulista ja nukkua tapa lisätä viivettä. Seuraavaksi luodaan muuttuja nimellä liikettä. Tämä muuttuja havaitsee, havaitaanko liikettä vai ei.
Sitten loimme funktion käsittele_keskeytys. Tämä toiminto aktivoituu aina, kun PIR-anturi havaitsee liikettä. Se ottaa nastan tuloparametrina ja osoittaa nastan, joka aiheuttaa keskeytyksen.
Yksinkertaisesti sanottuna aina, kun PIR havaitsee liikkeen, käsittele_keskeytys asettaa liikemuuttujan arvoon tosi ja tallentaa nastan, joka aiheuttaa keskeytyksen. Yksi asia kannattaa muistaa ilmoittaa aina liikettä muuttuja globaaliksi, koska sitä tarvitaan koko koodissa.
Eteenpäin loimme kaksi nastaobjektia, joista toinen tallentaa LED-nastat ja toinen ottaa PIR-anturin lähdön GPIO-nastasta 13. Lisäksi julistimme laukaisunastan NOUSEMINEN tila.
Vuonna silmukka osa koodia, se tarkistaa liikemuuttujan arvon, kun se muuttuu todeksi LED syttyy kytkettynä ESP32:n nastaan 4. Jos liike pysähtynyt, LED sammuu 5 sekunnin kuluttua.
3.4: Lähtö
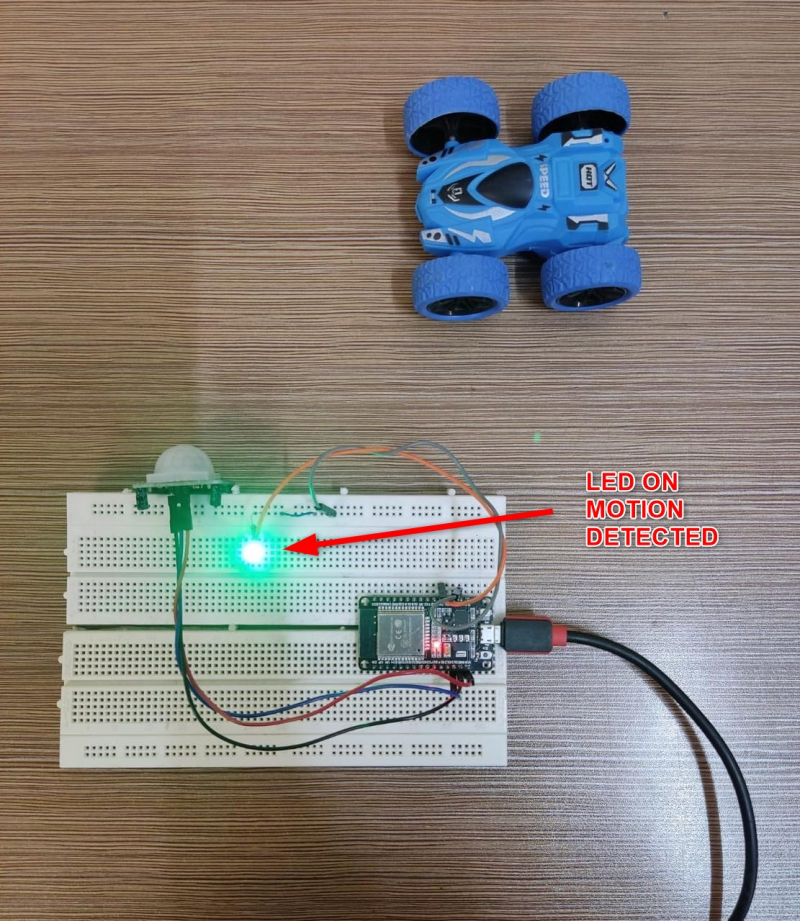
Lähtöosiossa näemme, että kohde on PIR-anturin kantaman ulkopuolella, joten LED on käännetty VINOSSA .
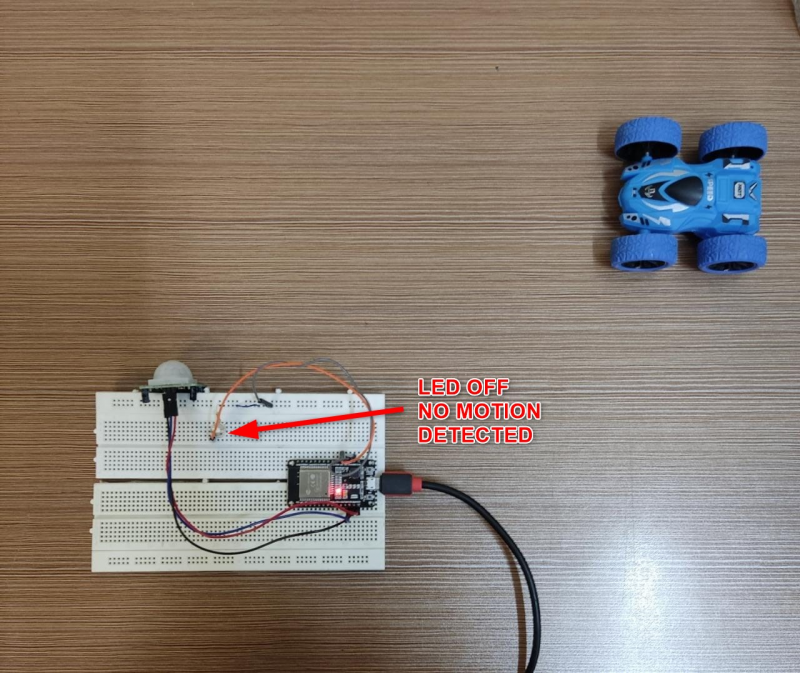
Nyt PIR-anturin LED-valon havaitsema liike vaihtuu PÄÄLLÄ varten 5 sek sen jälkeen, jos liikettä ei havaita, se pysyy VINOSSA kunnes seuraava laukaisu vastaanotetaan.
Seuraava tulos näkyy kuori/pääte Thonny IDE:ssä.
Johtopäätös
PIR-anturi ESP32:lla voi auttaa havaitsemaan erilaisten asioiden liikkeen. Käyttämällä keskeytystoimintoa MicroPythonissa ESP32:n kanssa voimme laukaista vastauksen tietyllä GPIO-nastalla. Kun muutos havaitaan, keskeytystoiminto laukeaa ja LED syttyy.