ESP32 on IoT-pohjainen mikro-ohjainkortti, jolla voidaan liittää, ohjata ja lukea erilaisia antureita. PIR tai liiketunnistin on yksi laitteista, joihin voimme liittää ESP32:n ja havaita kohteen liikkeen liiketunnistimen alueella ESP32:n avulla.
Ennen kuin alamme liittää ESP32:n PIR-anturin kanssa, meidän on tiedettävä, miten keskeytykset toimivat ja kuinka niitä luetaan ja käsitellään ESP32:ssa. Seuraavaksi meidän on ymmärrettävä viive()- ja millis()-funktioiden ydinkäsite ESP32-ohjelmoinnissa.
Keskustellaan PIR:n toiminnasta ESP32:n kanssa yksityiskohtaisesti.
Tässä on tämän artikkelin sisältö:
1: Mitä ovat keskeytykset
Suurin osa ESP32-ohjelmoinnin tapahtumista suoritetaan peräkkäin, mikä tarkoittaa koodin suorittamista rivi riviltä. Käsitelläksesi ja hallitaksesi tapahtumia, joita ei tarvitse suorittaa koodin peräkkäisen suorituksen aikana Keskeyttää käytetään.
Esimerkiksi, jos haluamme suorittaa tietyn tehtävän, kun jokin erikoistapahtuma tapahtuu, tai jos mikro-ohjaimen digitaalisille pinnoille annetaan laukaisusignaali, käytämme keskeytystä.
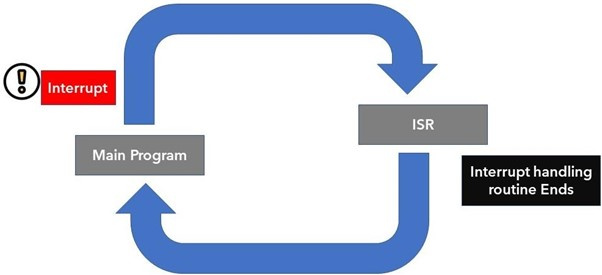
Keskeytyksen vuoksi meidän ei tarvitse jatkuvasti tarkistaa ESP32-tulonastan digitaalista tilaa. Kun keskeytys tapahtuu, prosessori pysäyttää pääohjelman ja kutsutaan uusi toiminto, joka tunnetaan nimellä ISR ( Keskeytä palvelurutiini ). Tämä ISR funktio käsittelee sen jälkeen aiheutetun keskeytyksen palaa takaisin pääohjelmaan ja aloittaa sen suorittamisen. Yksi esimerkeistä ISR:stä on PIR liiketunnistin joka luo keskeytyksen, kun liike havaitaan .
1.1: Keskeyttää nastat ESP32:ssa
Ulkoisen tai laitteiston keskeytyksen voi aiheuttaa mikä tahansa laitteistomoduuli, kuten kosketusanturi tai painopainike. Kosketuskeskeytykset tapahtuvat, kun ESP32-nastojen kosketus havaitaan, tai GPIO-keskeytystä voidaan käyttää myös, kun näppäintä tai painopainiketta painetaan.
Tässä artikkelissa käynnistämme keskeytyksen, kun liike havaitaan käyttämällä PIR-anturia ESP32:n kanssa.
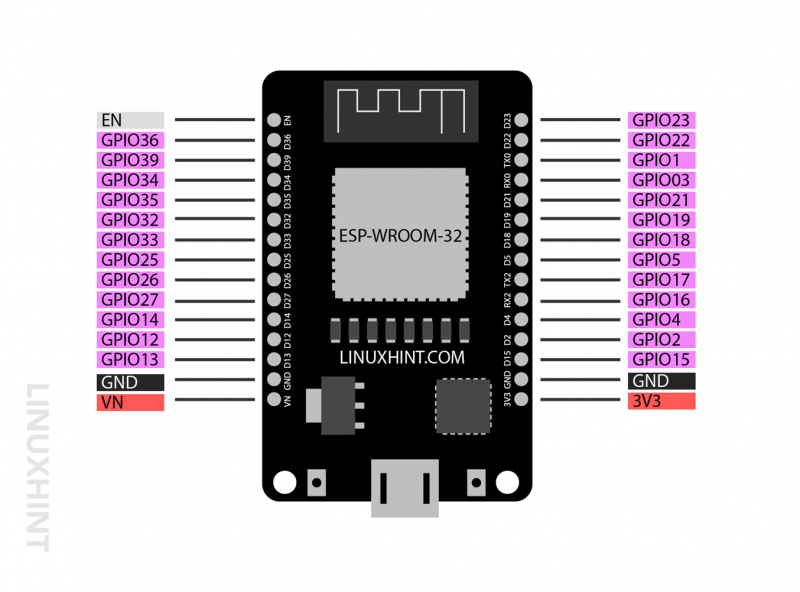
Melkein kaikki GPIO-nastat paitsi 6 integroitua SPI-nastaa, jotka yleensä tulevat sisään 36 ESP32-kortin -pin-versiota ei voida käyttää keskeytyspuhelun tarkoitukseen. Joten ulkoisen keskeytyksen vastaanottamiseksi seuraavat ovat purppuravärillä korostetut nastat, joita voidaan käyttää ESP32:ssa:
Tämä kuva on 30-nastaisesta ESP32:sta.
1.2: Keskeytyksen kutsuminen ESP32:ssa
Keskeytyksen käyttämiseksi ESP32:ssa voimme soittaa attachInterrupt() toiminto.
Tämä funktio hyväksyy seuraavat kolme argumenttia:
-
- GPIO pin
- Suoritettava toiminto
- tila
1: GPIO pin on ensimmäinen argumentti, jota kutsutaan sisällä attachInterrupt() toiminto. Esimerkiksi käyttääksesi digitaalista nastaa 12 keskeytyslähteenä voimme kutsua sitä käyttämällä digitalPinToInterrupt(12) toiminto.
2: Toiminto suoritettava on ohjelma, joka suoritetaan joka kerta, kun ulkoinen tai sisäinen lähde saavuttaa keskeytyksen tai laukaisee sen. Se voi olla joko LEDin vilkkumista tai palohälyttimen kääntämistä.
3: Tila on kolmas ja viimeinen keskeytysfunktion tarvitsema argumentti. Se kuvaa, milloin keskeytys laukaistaan. Seuraavia tiloja voidaan käyttää:
-
- Matala: Laukaise keskeytys aina, kun määritetty GPIO-nasta on alhainen.
- Korkea: Laukaise keskeytys aina, kun määritetty GPIO-nasta on korkea.
- Muuttaa: Liipaista keskeytys aina, kun GPIO-nasta muuttaa arvoaan korkeasta matalaksi tai päinvastoin.
- Putoaminen: Se on tila, joka laukaisee keskeytyksen, kun tietty nasta alkaa pudota korkeasta tilasta matalaan.
- Nouseva: Se on tila, joka laukaisee keskeytyksen, kun tietty nasta alkaa nousta matalasta tilasta korkeaan.
Tänään käytämme Nousemassa tila kolmantena argumenttina keskeytystoiminnolle aina, kun PIR-anturi havaitsee keskeytyksen LED tai anturi syttyy, koska se siirtyy matalasta tilasta korkeaan.
2: ESP32-ohjelmoinnin ajastimet
Mikrokontrolleriohjelmoinnin ajastimilla on merkittävä rooli käskyjen suorittamisessa tietyn ajastinjakson tai tietyn ajankohdan aikana.
Kaksi päätoimintoa, joita yleisesti käytetään ulostulon laukaisemiseen, ovat viive() ja millis() . Molempien välinen ero delay()-funktiona pysäyttää ohjelman loput sen käynnistyttyä, kun taas millis() on käynnissä määritetyn ajan, sitten ohjelma palaa päätoimintoihin.
Tässä käytämme LEDiä PIR-anturilla, emmekä halua hehkua sitä jatkuvasti keskeytyksen laukaisun jälkeen. Käytämme millis()-funktiota, jonka avulla voimme hehkuttaa sitä jonkin määritellyn ajan ja palata sitten takaisin alkuperäiseen ohjelmaan, kun aikaleima on kulunut.
2.1: delay()-funktio
delay()-funktio on melko yksinkertainen, se vaatii vain yhden argumentin, joka on neiti allekirjoittamaton pitkä tietotyyppi. Tämä argumentti edustaa aikaa millisekunteina, jolloin haluamme keskeyttää ohjelman, kunnes se siirtyy seuraavalle riville.
Esimerkiksi seuraava toiminto pysäyttää ohjelman 1 sekunti .
viive ( 1000 )
delay() on eräänlainen estotoiminto mikro-ohjainten ohjelmoinnissa. delay() estää muun koodin suorittamisen, kunnes tämä tietty toiminto ei ole suoritettu loppuun. Jos haluamme suorittaa useita käskyjä, meidän tulee välttää viivetoimintojen käyttöä sen sijaan, että voimme käyttää millis- tai ulkoisia ajastin-RTC-moduuleja.
2.2: millis()-funktio
millis()-funktio palauttaa millisekuntien määrän, joka on kulunut siitä, kun ESP32-kortti aloitti nykyisen ohjelman suorittamisen. Kirjoittamalla muutaman rivin koodia voimme helposti laskea nykyisen ajan missä tahansa tapauksessa ESP32-koodin suorittamisen aikana.
millis on laajalti käytössä, kun meidän on suoritettava useita tehtäviä ilman, että estämme muun koodin. Tässä on millis-funktion syntaksi, jota käytetään laskemaan, kuinka paljon aikaa kului, jotta voimme suorittaa tietyn käskyn.
jos ( nykyinenMillis - edellinenMillis > = intervalli ) {previousMillis = nykyinenMillis;
}
Tämä koodi vähentää edellisen millis():n nykyisestä millis():stä, jos vähennetty aika on yhtä suuri kuin tietyn käskyn suoritusvälin määrittely. Oletetaan, että haluamme vilkkua LED-valoa 10 sekunnin ajan. Joka 5 minuutin välein voimme asettaa aikaväliksi 5 minuuttia (300 000 ms). Koodi tarkistaa intervallin joka kerta, kun koodi suoritetaan, kun se saavuttaa sen, LED vilkkuu 10 sekunnin ajan.
merkintä: Tässä käytämme millis()-funktiota ESP32:n liittämiseen PIR-anturin kanssa. Suurin syy millin ja viiveen käyttämiseen on, että millis()-funktio ei estä koodia kuten delay()-funktio teki. Joten kun PIR havaitsee liikkeen, syntyy keskeytys. Keskeytyksen millis() käyttö laukaisee LEDin määritetyksi ajaksi, jonka jälkeen jos liike pysäytetään, millis()-funktio nollautuu ja odottaa seuraavaa keskeytystä.
Jos käytimme delay()-funktiota, se estää koodin kokonaan eikä ESP32 lue mitään aiheuttamia keskeytyksiä, mikä johtaa projektin epäonnistumiseen.
3: Liitäntä PIR-anturiin ESP32:n kanssa
Tässä käytämme millis()-funktiota Arduino IDE -koodissa, koska haluamme laukaista LEDin aina, kun PIR-anturi havaitsee liikettä. Tämä LED palaa tietyn ajan, jonka jälkeen se palaa normaalitilaan.
Tässä on luettelo komponenteista, joita tarvitsemme:
-
- ESP32 kehityskortti
- PIR-liiketunnistin (HC-SR501)
- LED
- 330 ohmin vastus
- Kytkentäjohdot
- Leipälauta
Kaaviomainen PIR-anturi ESP32:lla:
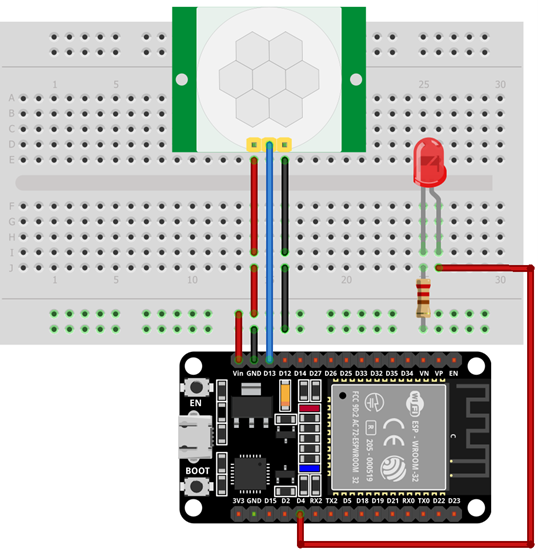
PIR-anturilla varustetun ESP32:n nastaliitännät ovat:
| ESP32 | PIR anturi |
| tule | Vcc |
| GPIO13 | OUT |
| GND | GND |
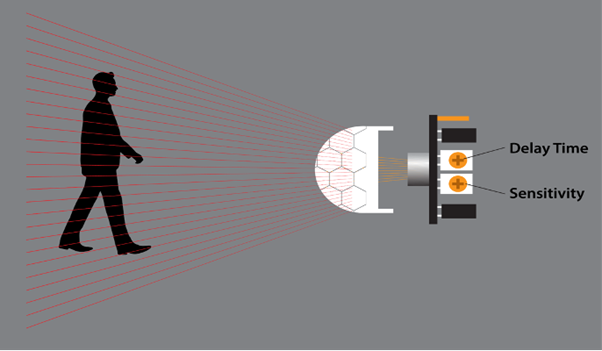
3.1: PIR-liiketunnistin (HC-SR501)
PIR on lyhenne sanoista passiivinen infrapuna-anturi . Se käyttää paria pyrosähköisiä antureita, jotka havaitsevat lämpöä ympäristöstään. Molemmat pyrosähköiset anturit sijaitsevat peräkkäin, ja kun esine tulee niiden kantaman sisäpuolelle, lämpöenergian muutos tai signaaliero näiden molempien antureiden välillä aiheuttaa PIR-anturin lähdön olevan MATALA. Kun PIR-ulostulonasta on LOW, voimme asettaa tietyn käskyn suoritettavaksi.
Seuraavat ovat PIR-anturin ominaisuudet:
-
- Herkkyys voidaan asettaa projektin sijainnin mukaan (kuten hiiren tai lehtien liikkeen havaitseminen).
- PIR-anturi voidaan asettaa, kuinka kauan se havaitsee kohteen.
- Käytetään laajasti kodin turvahälyttimissä ja muissa lämpöpohjaisissa liikkeentunnistussovelluksissa.
3.2: Pinout HC-SR501
PIR HC-SR501:ssä on kolme nastaa. Kaksi niistä on virtanastaa Vcc:lle ja GND:lle ja yksi on lähtönasta liipaisusignaalille.
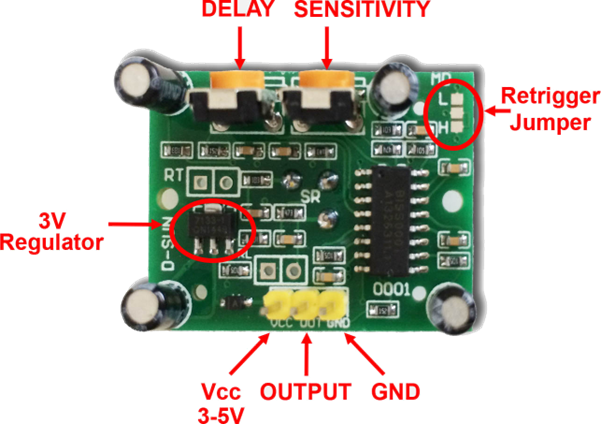
Seuraavassa on kuvaus PIR-anturin nastat:
| Pin | Nimi | Kuvaus |
| 1 | Vcc | Anturin tulonasta Yhdistä ESP32 Vin Pin-liittimeen |
| kaksi | OUT | Anturin lähtö |
| 3 | GND | Anturi GND |
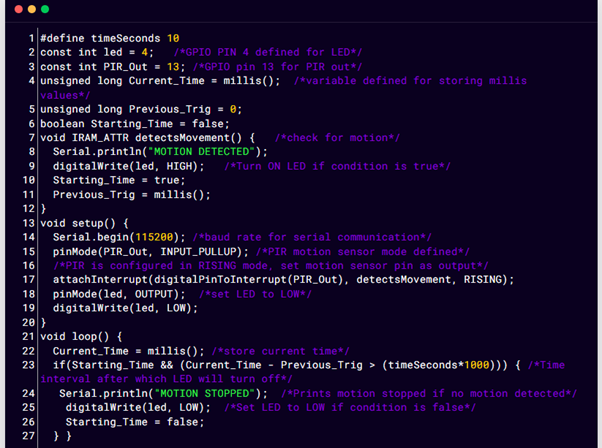
3.3: Koodi
Nyt ESP32:n ohjelmoimiseksi kirjoita annettu koodi Arduino IDE -editoriin ja lataa se ESP32:een.
#define timeSekuntia 10const int led = 4 ; /* GPIO PIN 4 määritelty varten LED */
const int PIR_Out = 13 ; /* GPIO pin 13 varten PIR ulos */
etumerkitön pitkä Current_Time = millis ( ) ; /* muuttuja määritelty varten millis-arvojen tallentaminen */
allekirjoittamaton pitkä Previous_Trig = 0 ;
boolean Aloitusaika = väärä ;
void IRAM_ATTR havaitsee liikkeen ( ) { /* tarkistaa varten liikettä */
Serial.println ( 'LIIKKE TUNNISTETTU' ) ;
digitalWrite ( led, HIGH ) ; /* Kytke LED PÄÄLLE jos kunto on totta */
Aloitusaika = totta ;
Edellinen_Trig = millis ( ) ;
}
tyhjä asetus ( ) {
Serial.begin ( 115 200 ) ; /* baudinopeus varten sarjaliikennettä */
pinMode ( PIR_Out, INPUT_PULLUP ) ; /* PIR-liiketunnistimen tila määritetty */
/* PIR on määritetty sisään RISING-tila, aseta liiketunnistimen tappi kuten ulostulo */
liitä keskeytys ( digitalPinToInterrupt ( PIR_Out ) , havaitsee liikkeen, NOUSEMINEN ) ;
pinMode ( led, OUTPUT ) ; /* aseta LEDistä LOW */
digitalWrite ( led, LOW ) ;
}
tyhjä silmukka ( ) {
Nykyinen_aika = millis ( ) ; /* tallentaa virtaa aika */
jos ( Aloitusaika && ( Nykyinen_aika - Edellinen_Trig > ( aikaSekuntia * 1000 ) ) ) { /* Aikaväli jälkeen joka LED sammuu */
Serial.println ( 'LIIKKE PYSÄYTETTY' ) ; /* Tulostaa liike pysähtynyt jos liikettä ei havaittu */
digitalWrite ( led, LOW ) ; /* Aseta LED tilaan LOW jos kunto on väärä */
Aloitusaika = väärä ;
}
}
Koodi alkoi määrittämällä GPIO-nastat LED- ja PIR-lähdölle. Seuraavaksi loimme kolme erilaista muuttujaa, jotka auttavat sytyttämään LEDin, kun liikettä havaitaan.
Nämä kolme muuttujaa ovat Nykyinen_aika, Edellinen_Trig, ja Aloitusaika. Nämä muuttujat tallentavat nykyisen ajan, ajan, jolloin liike havaitaan, ja ajastimen liikkeen havaitsemisen jälkeen.
Asennusosassa määritimme ensin sarjasiirtonopeuden tiedonsiirrolle. Seuraava käyttö pinMode() aseta PIR-liiketunnistimeksi INPUT PULLUP. PIR-keskeytyksen asettaminen attachInterrupt() on kuvattu. GPIO 13 on kuvattu havaitsemaan liikettä RISING-tilassa.
Seuraavaksi koodin loop()-osassa, käyttämällä millis()-funktiota, käänsimme LEDin päälle ja pois päältä, kun laukaisu saavutettiin.
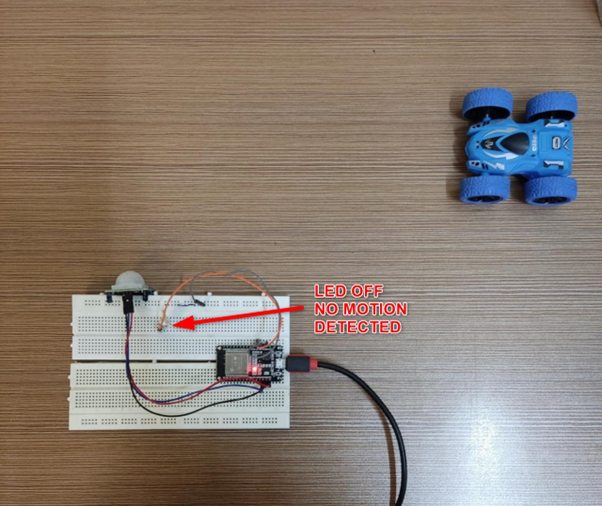
3.4: Lähtö
Lähtöosiossa näemme, että kohde on PIR-anturin kantaman ulkopuolella, joten LED on käännetty VINOSSA .
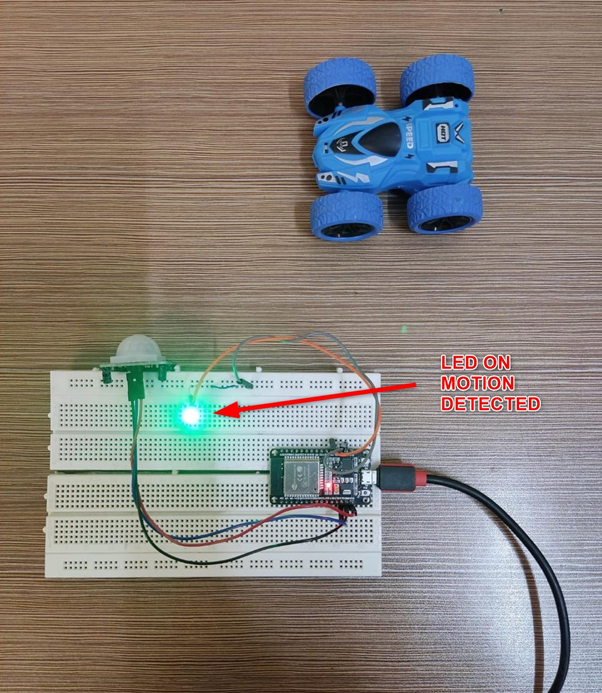
Nyt PIR-anturin LED-valon havaitsema liike vaihtuu PÄÄLLÄ varten 10 sek sen jälkeen, jos liikettä ei havaita, se pysyy VINOSSA kunnes seuraava laukaisu vastaanotetaan.
Arduino IDE:n sarjamonitori näyttää seuraavan lähdön.
Johtopäätös
ESP32:lla varustettu PIR-anturi voi auttaa havaitsemaan alueen läpi kulkevien esineiden liikkeet. Käyttämällä keskeytystoimintoa ESP32-ohjelmoinnissa voimme laukaista vastauksen tietyllä GPIO-nastalla. Kun muutos havaitaan, keskeytystoiminto laukeaa ja LED syttyy.